塑造好人品,做好每件事
成就好产品

保证正确的方向,保证更快的速度
保证更佳的效率
尊重中互相理解,信任中互相支持
沟通中达到共识,互惠中实现共赢
互助中成就彼此


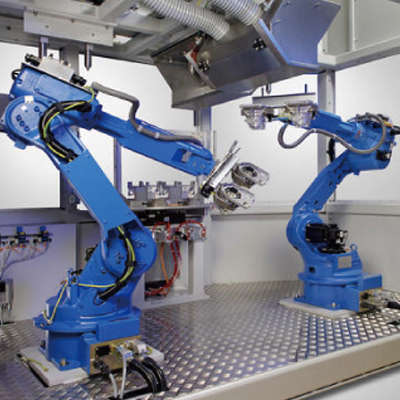
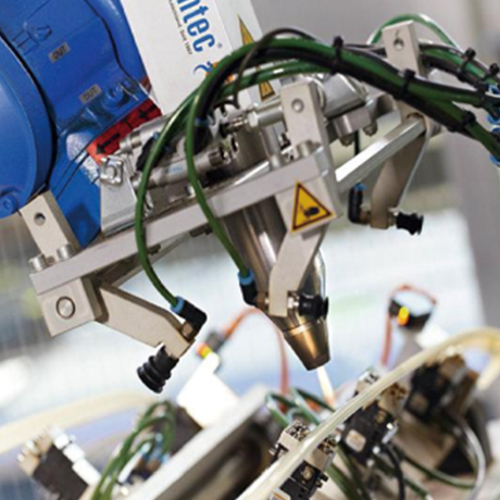
以高质量的技术和诚信服务的态度结合客户的现场情况从而为客户提供一套量身定制的方案

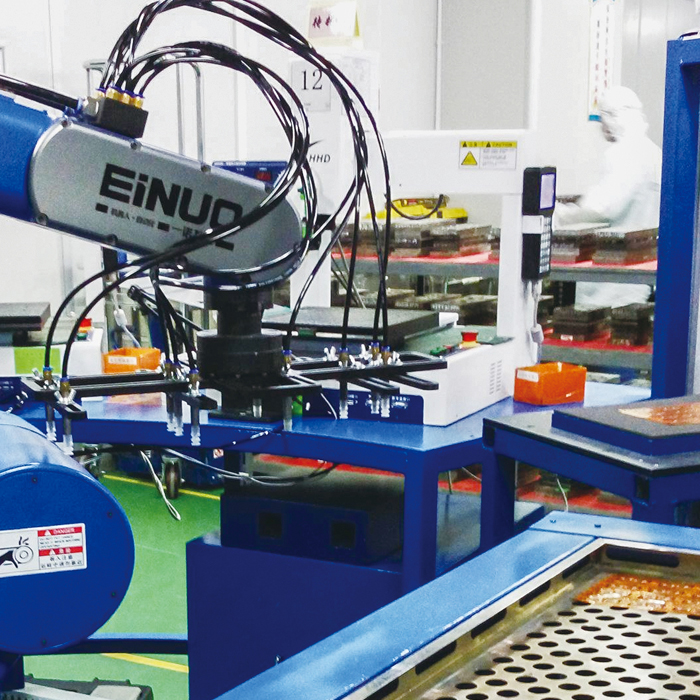
针对客户意向,结合我司技术方案。本着客户至上的优质服务态度,我司全程专项专人为客户制定出适合的自动化方案

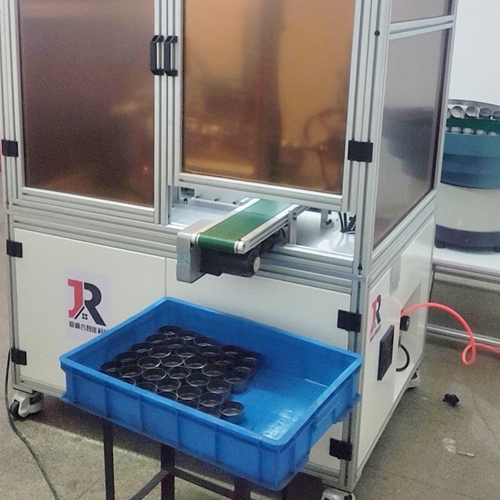
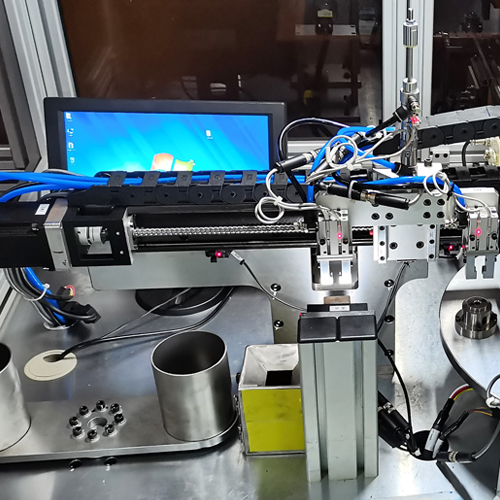
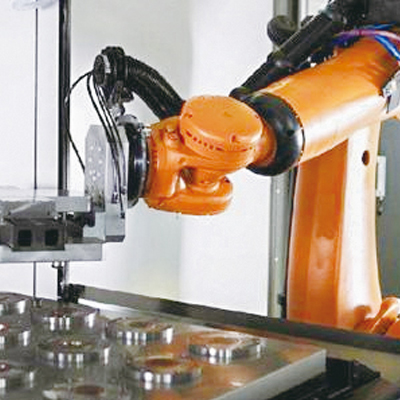
现场安装调试由专业的机械安装以及有着丰富的现场调试人员共同完成,确保设备按期投入正常生产

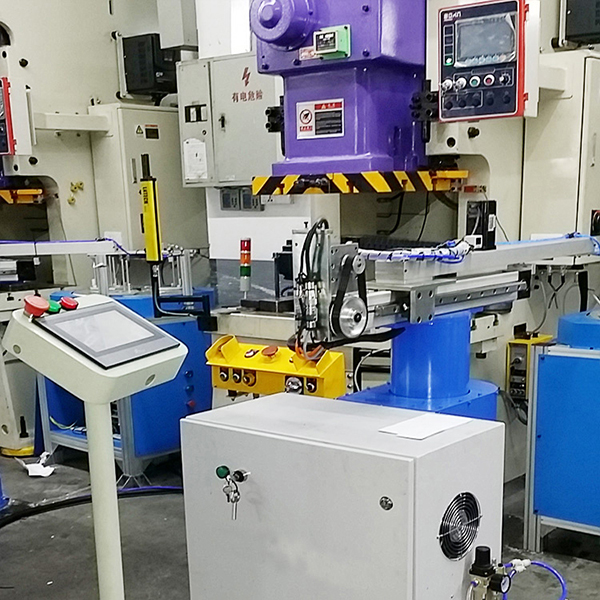
公司配备独立的售后服务团队以确保本公司销售设备能稳定生产专人负责定期回访